| Citation: | WANG Tingting, HE Xiuyu, ZOU Yao, FU Qiang, HE Wei. Research progress on the flight control of flapping-wing aerial vehicles[J]. Chinese Journal of Engineering, 2023, 45(10): 1630-1640. doi: 10.13374/j.issn2095-9389.2022.12.24.001

|

| [1] |
Muijres F T, Elzinga M J, Melis J M, et al. Flies evade looming targets by executing rapid visually directed banked turns. Science, 2014, 344(6180): 172 doi: 10.1126/science.1248955
|
| [2] |
MacKenzie D. A flapping of wings. Science, 2012, 335(6075): 1430 doi: 10.1126/science.335.6075.1430
|
| [3] |
Sun M. Insect flight dynamics: Stability and control. Rev Mod Phys, 2014, 86(2): 615 doi: 10.1103/RevModPhys.86.615
|
| [4] |
Liang S R, Song B F, Yang W Q, et al. Experimental study on dynamic modeling of flapping wing micro aerial vehicle. Lect Notes Comput Sci, 2017: 602
|
| [5] |
劉軍濤. 一種帶翼型撲翼飛行機器人設計及飛行控制研究[學位論文]. 哈爾濱: 哈爾濱工業大學, 2018
Liu J T. Design and Flight Control of a Flapping-Wing Flying Robot with Airfoil [Dissertation]. Harbin: Harbin Institute of Technology, 2018
|
| [6] |
鄒陽. 仿昆蟲撲翼微飛行器的設計、制造與測試研究[學位論文]. 上海: 上海交通大學, 2018
Zou Y. Design, Manufacture and Test of Insect-like Flapping-Wing Micro Air Vehicle [Dissertation]. Shanghai: Shanghai Jiao Tong University, 2018
|
| [7] |
Graule M A, Chirarattananon P, Fuller S B, et al. Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion. Science, 2016, 352(6288): 978 doi: 10.1126/science.aaf1092
|
| [8] |
Prum R O. Development and evolutionary origin of feathers. J Exp Zool, 1999, 285(4): 291 doi: 10.1002/(SICI)1097-010X(19991215)285:4<291::AID-JEZ1>3.0.CO;2-9
|
| [9] |
Chin D D, Matloff L Y, Stowers A K, et al. Inspiration for wing design: How forelimb specialization enables active flight in modern vertebrates. J R Soc Interface, 2017, 14(131): 20170240 doi: 10.1098/rsif.2017.0240
|
| [10] |
Yu M K, Wu P, Widelitz R B, et al. The morphogenesis of feathers. Nature, 2002, 420(6913): 308 doi: 10.1038/nature01196
|
| [11] |
Zhang F L, Jiang L, Wang S T. Repairable cascaded slide-lock system endows bird feathers with tear-resistance and superdurability. Proc Natl Acad Sci USA, 2018, 115(40): 10046 doi: 10.1073/pnas.1808293115
|
| [12] |
Sullivan T N, Chon M, Ramachandramoorthy R, et al. Reversible attachment with tailored permeability: The feather vane and bioinspired designs. Adv Funct Mater, 2017, 27(39): 1702954 doi: 10.1002/adfm.201702954
|
| [13] |
Ravi S, Crall J, Fisher A, et al. Rolling with the flow: Bumblebees flying in unsteady wakes. J Exp Biol, 2013, 216(22): 4299
|
| [14] |
孫茂, 劉彥鵬, 王濟康. 昆蟲懸停飛行的動穩定性: 理論分析與數值模擬. 空氣動力學學報, 2008, 26(z1):6
Sun M, Liu Y P, Wang J K. Dynamic flight stability of hovering insect: Theoretical analysis and numerical simulation. Acta Aerodynamica Sinica, 2008, 26(z1): 6
|
| [15] |
Ellington C P, van den Berg C, Willmott A P, et al. Leading-edge vortices in insect flight. Nature, 1996, 384(6610): 626 doi: 10.1038/384626a0
|
| [16] |
Sun M, Tang J. Unsteady aerodynamic force generation by a model fruit fly wing in flapping motion. J Exp Biol, 2002, 205(Pt 1): 55
|
| [17] |
Beatus T, Guckenheimer J M, Cohen I. Controlling roll perturbations in fruit flies. J R Soc Interface, 2015, 12(105): 20150075 doi: 10.1098/rsif.2015.0075
|
| [18] |
Maxworthy T. The formation and maintenance of a leading-edge vortex during the forward motion of an animal wing. J Fluid Mech, 2007, 587: 471 doi: 10.1017/S0022112007007616
|
| [19] |
Ramezani A, Chung S J, Hutchinson S. A biomimetic robotic platform to study flight specializations of bats. Sci Robot, 2017, 2(3): eaal2505 doi: 10.1126/scirobotics.aal2505
|
| [20] |
Keennon M, Klingebiel K, Won H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle // 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Nashville, 2012: 588
|
| [21] |
Gerdes J, Holness A, Perez-Rosado A, et al. Robo raven: A flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robotics, 2014, 1(4): 275 doi: 10.1089/soro.2014.0019
|
| [22] |
Chen Y F, Wang H Q, Helbling E F, et al. A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot. Sci Robot, 2017, 2(11): eaao5619 doi: 10.1126/scirobotics.aao5619
|
| [23] |
Yang W Q, Wang L G, Song B F. Dove: A biomimetic flapping-wing micro air vehicle. Int J Micro Air Veh, 2018, 10(1): 70 doi: 10.1177/1756829317734837
|
| [24] |
遲鵬程, 張衛平, 陳文元, 等. 基于MEMS技術的SU-8仿昆蟲微撲翼飛行器設計及制作. 機器人, 2011, 33(3):366 doi: 10.3724/SP.J.1218.2011.00366
Chi P C, Zhang W P, Chen W Y, et al. Design and fabrication of an SU-8 biomimetic flapping-wing micro air vehicle by MEMS technology. Robot, 2011, 33(3): 366 doi: 10.3724/SP.J.1218.2011.00366
|
| [25] |
Ortega-Jimenez V M, Greeter J S M, Mittal R, et al. Hawkmoth flight stability in turbulent vortex streets. J Exp Biol, 2013, 216(Pt 24): 4567
|
| [26] |
Seelig J D, Jayaraman V. Feature detection and orientation tuning in the Drosophila central complex. Nature, 2013, 503(7475): 262 doi: 10.1038/nature12601
|
| [27] |
Dyhr J P, Morgansen K A, Daniel T L, et al. Flexible strategies for flight control: An active role for the abdomen. J Exp Biol, 2013, 216(Pt 9): 1523
|
| [28] |
Vance J T, Faruque I, Humbert J S. Kinematic strategies for mitigating gust perturbations in insects. Bioinspir Biomim, 2013, 8(1): 016004 doi: 10.1088/1748-3182/8/1/016004
|
| [29] |
Xu N, Sun M. Lateral dynamic flight stability of a model bumblebee in hovering and forward flight. J Theor Biol, 2013, 319: 102 doi: 10.1016/j.jtbi.2012.11.033
|
| [30] |
Pennycuick C. The flight of birds and other animals. Aerospace, 2015, 2(3): 505 doi: 10.3390/aerospace2030505
|
| [31] |
Lentink D, Müller U K, Stamhuis E J, et al. How swifts control their glide performance with morphing wings. Nature, 2007, 446(7139): 1082 doi: 10.1038/nature05733
|
| [32] |
Crandell K E, Tobalske B W. Aerodynamics of tip-reversal upstroke in a revolving pigeon wing. J Exp Biol, 2011, 214: 1867 doi: 10.1242/jeb.051342
|
| [33] |
Hieronymus T L. Flight feather attachment in rock pigeons (Columba livia): Covert feathers and smooth muscle coordinate a morphing wing. J Anat, 2016, 229(5): 631 doi: 10.1111/joa.12511
|
| [34] |
Stowers A K, Matloff L Y, Lentink D. How pigeons couple three-dimensional elbow and wrist motion to morph their wings. J R Soc Interface, 2017, 14(133): 20170224 doi: 10.1098/rsif.2017.0224
|
| [35] |
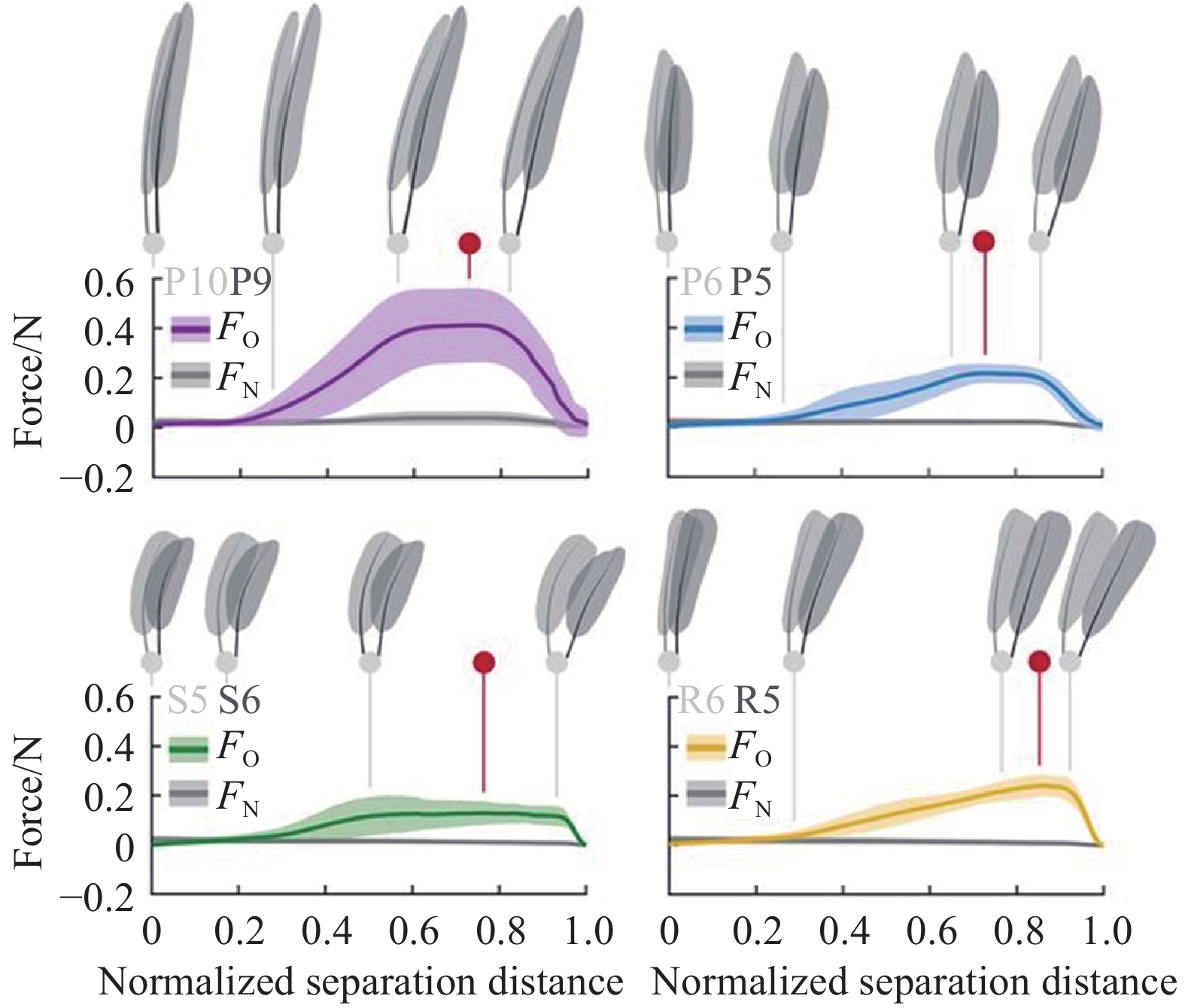
Matloff L Y, Chang E, Feo T J, et al. How flight feathers stick together to form a continuous morphing wing. Science, 2020, 367(6475): 293 doi: 10.1126/science.aaz3358
|
| [36] |
Dickinson M H, Lehmann F O, Sane S P. Wing rotation and the aerodynamic basis of insect flight. Science, 1999, 284(5422): 1954 doi: 10.1126/science.284.5422.1954
|
| [37] |
Whitehead S C, Beatus T, Canale L, et al. Pitch perfect: How fruit flies control their body pitch angle. J Exp Biol, 2015, 218(21): 3508
|
| [38] |
Jayakumar J, Senda K, Yokoyama N. Control of pitch attitude by abdomen during forward flight of two-dimensional butterfly. J Aircr, 2018, 55(6): 2327 doi: 10.2514/1.C034767
|
| [39] |
Senda K, Obara T, Kitamura M, et al. Modeling and emergence of flapping flight of butterfly based on experimental measurements. Robotics Auton Syst, 2012, 60(5): 670 doi: 10.1016/j.robot.2011.12.007
|
| [40] |
Fu Q, Wang J, Gong L, et al. Obstacle avoidance of flapping-wing air vehicles based on optical flow and fuzzy control. Trans Nanjing Univ Aeronaut Astronaut, 2021, 38(2): 206
|
| [41] |
Pan E Z, Liu J T, Chen L R, et al. The embedded on-board controller and ground monitoring system of a flapping-wing aerial vehicle // 2018 IEEE International Conference on Real-time Computing and Robotics (RCAR). Kandima, 2019: 72
|
| [42] |
Wang T H, Jin S T, Hou Z S. Model free adaptive pitch control of a flapping wing micro aerial vehicle with input saturation // 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS). Liuzhou, 2020: 627
|
| [43] |
Liu M, Ma D X, Li S. Neural dynamics for adaptive attitude tracking control of a flapping wing micro aerial vehicle. Neurocomputing, 2021, 456: 364 doi: 10.1016/j.neucom.2021.05.088
|
| [44] |
Li Q W, Duan H J. Modeling and adaptive control for flapping-wing micro aerial vehicle // International Conference on Intelligent Computing. Berlin, 2012: 269
|
| [45] |
胡盛斌, 陸文華, 張興媛, 等. 微撲翼飛行機器人姿態反演自適應模糊控制. 計算機仿真, 2011, 28(5):80
Hu S B, Lu W H, Zhang X Y, et al. Adaptive fuzzy control of attitude of the flapping-wing micro air vehicles based on backstepping. Comput Simul, 2011, 28(5): 80
|
| [46] |
Tijmons S, de Croon G C H E, Remes B D W, et al. Obstacle avoidance strategy using onboard stereo vision on a flapping wing MAV. IEEE Trans Robotics, 2017, 33(4): 858 doi: 10.1109/TRO.2017.2683530
|
| [47] |
Fu Q, Wang X Q, Zou Y, et al. A miniature video stabilization system for flapping-wing aerial vehicles. Guid Navigat Control, 2022, 2(1): 2250001 doi: 10.1142/S2737480722500017
|
| [48] |
Huang H F, He W, Fu Q, et al. A bio-inspired flapping-wing robot with cambered wings and its application in autonomous airdrop. IEEE/CAA J Autom Sin, 2022, 9(12): 2138 doi: 10.1109/JAS.2022.106040
|
| [49] |
付強, 張樹禹, 王久斌, 等. 基于外部單目視覺的仿生撲翼飛行器室內定高控制. 工程科學學報, 2020, 42(2):249
Fu Q, Zhang S Y, Wang J B, et al. Indoor fixed-height control for bio-inspired flapping-wing aerial vehicles based on offboard monocular vision. Chin J Eng, 2020, 42(2): 249
|
| [50] |
Liang S R, Song B F, Xuan J L. Active disturbance rejection attitude control for a bird-like flapping wing micro air vehicle during automatic landing. IEEE Access, 2020, 8: 171359 doi: 10.1109/ACCESS.2020.3024793
|
| [51] |
He W, Mu X X, Zhang L, et al. Modeling and trajectory tracking control for flapping-wing micro aerial vehicles. IEEE/CAA J Autom Sin, 2020, 8(1): 148
|
| [52] |
Rakotomamonjy T, Ouladsine M, Le Moing T. Longitudinal modelling and control of a flapping-wing micro aerial vehicle. Control Eng Pract, 2010, 18(7): 679 doi: 10.1016/j.conengprac.2010.02.002
|
| [53] |
Hsiao F Y, Yang L J, Lin S H, et al. Autopilots for ultra lightweight robotic birds: Automatic altitude control and system integration of a sub-10 g weight flapping-wing micro air vehicle. IEEE Control Syst Mag, 2012, 32(5): 35 doi: 10.1109/MCS.2012.2205475
|
| [54] |
Torres J Z, Davila J, Lozano R. Attitude and altitude control on board of an ornithopter // 2016 International Conference on Unmanned Aircraft Systems (ICUAS). Arlington, 2016: 1124
|
| [55] |
Qian C, Fang Y C. Adaptive tracking control of flapping wing micro-air vehicles with averaging theory. CAAI Trans Intell Technol, 2018, 3(1): 18 doi: 10.1049/trit.2018.0007
|
| [56] |
Chandrasekaran B K, Steck J. An adaptive flight control system for A flapping wing aircraft // 2018 AIAA Guidance, Navigation, and Control Conference. Kissimmee, 2018: 1
|
| [57] |
Chandrasekaran B K, Steck J E. An adaptive flight control system for a morphing flapping wing aircraft // Advances in Adaptive Control for Aerospace Systems I. Orlando, 2020: 1
|
| [58] |
Dietl J, Garcia E. Ornithopter control with periodic infinite horizon controllers. J Guid Control Dyn, 2011, 34(5): 1412 doi: 10.2514/1.52694
|
| [59] |
Fei F, Tu Z, Zhang J, et al. Learning extreme hummingbird maneuvers on flapping wing robots // 2019 International Conference on Robotics and Automation (ICRA). New York, 2019: 109
|
| [60] |
Xu W F, Pan E Z, Liu J T, et al. Flight control of a large-scale flapping-wing flying robotic bird: System development and flight experiment. Chin J Aeronaut, 2022, 35(2): 235 doi: 10.1016/j.cja.2021.03.009
|
| [61] |
Li Y H, Liu J T, Xu H, et al. An autonomous flight control strategy based on human-skill imitation for flapping-wing aerial vehicle // Intelligent Robotics and Applications: 14th International Conference. Yantai, 2021: 34
|
| [62] |
Ji B, Zhu Q L, Guo S J, et al. Design and experiment of a bionic flapping wing mechanism with flapping–twist–swing motion based on a single rotation. AIP Adv, 2020, 10(6): 065018 doi: 10.1063/5.0008792
|
| [63] |
賀威, 劉上平, 黃海豐, 等. 獨立驅動的仿鳥撲翼飛行機器人的系統設計與實驗. 控制理論與應用, 2022, 39(1):12
He W, Liu S P, Huang H F, et al. System design and experiment of an independently driven bird-like flapping-wing robot. Control Theory Appl, 2022, 39(1): 12
|
| [64] |
Paranjape A A, Chung S J, Kim J. Novel dihedral-based control of flapping-wing aircraft with application to perching. IEEE Trans Robotics, 2013, 29(5): 1071 doi: 10.1109/TRO.2013.2268947
|
| [65] |
Roberts L, Bruck H A, Gupta S K. Autonomous loitering control for a flapping wing miniature aerial vehicle with independent wing control // Proceedings of ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Buffalo, 2015: 1
|
| [66] |
Roberts L J, Bruck H A, Gupta S K. Modeling of dive maneuvers in flapping wing unmanned aerial vehicles // 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). West Lafayette, 2016: 1
|
| [67] |
Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping wing air vehicle. Nonlinear Dyn, 2016, 85(1): 47 doi: 10.1007/s11071-016-2666-8
|
| [68] |
Qian C, Fang Y C, Li Y P. Neural network-based hybrid three-dimensional position control for a flapping wing aerial vehicle. IEEE Trans Cybern, 2022, PP(99): 1
|
| [69] |
Rifa? H L, Marchand N, Poulin-Vittrant G. Bounded control of an underactuated biomimetic aerial vehicle—Validation with robustness tests. Robotics Auton Syst, 2012, 60(9): 1165 doi: 10.1016/j.robot.2012.05.011
|
| [70] |
Mousavi S M S, Pourtakdoust S H. Improved neural adaptive control for nonlinear oscillatory dynamic of flapping wings. J Guid Control Dyn, 2023, 46(1): 97 doi: 10.2514/1.G006478
|
| [71] |
李航, 何廣平, 畢富國. 一類微型撲翼飛行器的滑模自適應姿態控制. 空間控制技術與應用, 2018, 44(5):81
Li H, He G P, Bi F G. Sliding-mode adaptive attitude controller design for flapping-wing micro air vehicle. Aerosp Control Appl, 2018, 44(5): 81
|
| [72] |
Wood R J. The first takeoff of a biologically inspired At-scale robotic insect. IEEE Trans Robotics, 2008, 24(2): 341 doi: 10.1109/TRO.2008.916997
|
| [73] |
Chen Y F, Zhao H C, Mao J, et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature, 2019, 575(7782): 324 doi: 10.1038/s41586-019-1737-7
|
| [74] |
Chirarattananon P, Ma K Y, Wood R J. Adaptive control of a millimeter-scale flapping-wing robot. Bioinspir Biomim, 2014, 9(2): 025004 doi: 10.1088/1748-3182/9/2/025004
|
| [75] |
Phan H V, Aurecianus S, Kang T, et al. KUBeetle-S: an insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism. Int J Micro Air Veh, 2019, 11: 1
|
| [76] |
Karásek M, Muijres F T, Wagter C D, et al. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science, 2018, 361(6407): 1089 doi: 10.1126/science.aat0350
|
| [77] |
Jiao Z X, Wang L, Zhao L F, et al. Hover flight control of X-shaped flapping wing aircraft considering wing–tail interactions. Aerosp Sci Technol, 2021, 116: 106870 doi: 10.1016/j.ast.2021.106870
|
| [78] |
Dong W Z, Wang Z D. Indirect control and design of insect-like flapping-wing micro aerial vehicle // 2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC). Chongqing, 2017: 1257
|
| [79] |
Deng X Y, Schenato L, Sastry S S. Flapping flight for biomimetic robotic insects: Part II-flight control design. IEEE Trans Robotics, 2006, 22(4): 789 doi: 10.1109/TRO.2006.875483
|
| [80] |
Helps T, Romero C, Taghavi M, et al. Liquid-amplified zipping actuators for micro-air vehicles with transmission-free flapping. Sci Robot, 2022, 7(63): eabi8189 doi: 10.1126/scirobotics.abi8189
|
| [81] |
黃海豐, 賀威, 鄒堯, 等. 基于線驅轉向的仿蝴蝶撲翼飛行機器人系統設計與控制. 控制理論與應用, 2022, 39(7):1203
Huang H F, He W, Zou Y, et al. System design and control of flapping-wing flying robot imitating butterfly based on wire-driven steering. Control Theory Appl, 2022, 39(7): 1203
|
| [82] |
Phan H V, Park H C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science, 2020, 370(6521): 1214 doi: 10.1126/science.abd3285
|
| [83] |
Tu Z, Fei F, Zhang J, et al. Acting is seeing: Navigating tight space using flapping wings // 2019 International Conference on Robotics and Automation (ICRA). Montreal, 2019: 95
|
| [84] |
Peng K M, Lin F, Chen B M. Modeling and control analysis of a flapping-wing micro aerial vehicle // 2017 13th IEEE International Conference on Control & Automation (ICCA). Ohrid, 2017: 295
|
| [85] |
Ma K Y, Chirarattananon P, Fuller S B, et al. Controlled flight of a biologically inspired, insect-scale robot. Science, 2013, 340(6132): 603 doi: 10.1126/science.1231806
|
| [86] |
Fuller S B, Karpelson M, Censi A, et al. Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli. J R Soc Interface, 2014, 11(97): 20140281 doi: 10.1098/rsif.2014.0281
|
| [87] |
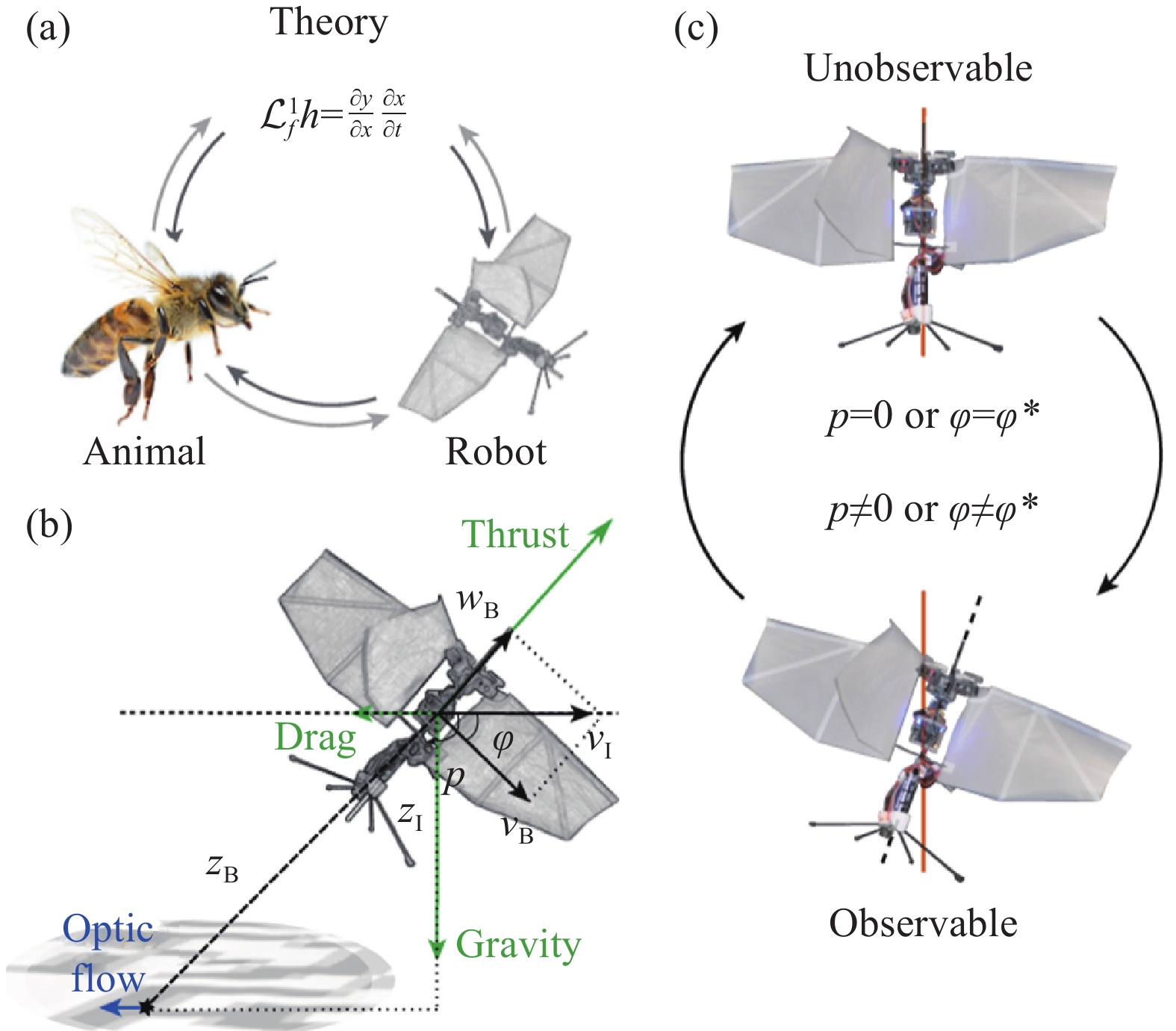
Croon G C H E, Dupeyroux J J G, Wagter C D, et al. Accommodating unobservability to control flight attitude with optic flow. Nature, 2022, 610(7932): 485 doi: 10.1038/s41586-022-05182-2
|
| [88] |
賀威, 孫長銀. 撲翼飛行機器人系統設計. 北京: 化學工業出版社, 2019
He W, Sun C Y. Design of Flapping-wing Flying Robot System. Beijing: Chemical Industry Press, 2019
|
| [89] |
He W, Tang X Y, Wang T T, et al. Trajectory tracking control for a three-dimensional flexible wing. IEEE Trans Control Syst Technol, 2022, 30(5): 2243 doi: 10.1109/TCST.2021.3139087
|
| [90] |
Paranjape A A, Guan J Y, Chung S J, et al. PDE boundary control for flexible articulated wings on a robotic aircraft. IEEE Trans Robotics, 2013, 29(3): 625 doi: 10.1109/TRO.2013.2240711
|
| [91] |
Paranjape A A, Chung S J, Hilton H H, et al. Dynamics and performance of tailless micro aerial vehicle with flexible articulated wings. AIAA J, 2012, 50(5): 1177 doi: 10.2514/1.J051447
|
| [92] |
Lhachemi H, Saussié D, Zhu G C. Boundary feedback stabilization of a flexible wing model under unsteady aerodynamic loads. Automatica, 2018, 97: 73 doi: 10.1016/j.automatica.2018.07.029
|
| [93] |
陳文元, 張衛平. 微型撲翼式仿生飛行器. 上海: 上海交通大學出版社, 2010
Chen W Y, Zhang W P. Micro Flapping-wing Bionic Aircraft. Shanghai: Shanghai Jiao Tong University Press, 2010
|
| [94] |
Jafferis N T, Helbling E F, Karpelson M, et al. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature, 2019, 570(7762): 491 doi: 10.1038/s41586-019-1322-0
|
| [95] |
Caetano J V, Percin M, Visser C C, et al. Tethered vs. free flight force determination of the DelFly II Flapping Wing Micro Air Vehicle // 2014 International Conference on Unmanned Aircraft Systems (ICUAS). Orlando, 2014: 942
|
Figures(11)
Editorial Department of Journal of Engineering Sciences
Address:No. 30 College Road, Haidian District, BeijingPost Code:100083 Tel:(010)62333436
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: